

หุ่นยนต์เสริมพลัง Exoskeleton Robot ฝีมือคนไทย นักวิจัย 3 สถาบัน สุดเจ๋ง ผนึกกำลังสร้าง

หุ่นยนต์ช่วยเดินเป็นเทคโนโลยีที่มีราคาสูง และนำมาใช้ในโรงพยาบาลใหญ่ ๆ เพียงบางแห่งเท่านั้น จึงเป็นเรื่องยากที่บุคคลทั่วไปจะสามารถเข้าถึงได้ บุคลากร 3 สถาบันและบริษัท ประกอบด้วย มหาวิทยาลัยเทคโนโลยีราชมงคลธัญบุรี (มทร.ธัญบุรี) มหาวิทยาลัยราชภัฏสวนสุนันทา โรงพยาบาลพระมงกุฎเกล้า และบริษัท ที ดี เอส เทคโนโลยี (ประเทศไทย) ซึ่งเป็นบริษัทเอกชน โดยได้รับการสนับสนุนงบประมาณหลัก ๆ จากหน่วยงานบริหารและจัดการทุนด้านการเพิ่มความสามารถในการแข่งขันของประเทศ (บพข) นำโดย รองศาสตราจารย์ ดร.เดชฤทธิ์ มณีธรรม หัวหน้าสาขาวิศวกรรมเมคคาทรอนิกส์ มหาวิทยาลัยเทคโนโลยีราชมงคลธัญบุรี หัวหน้าโครงการวิจัย รองศาสตราจารย์ ดร.เบญจลักษณ์ เมืองมีศรี คณะวิศวกรรมศาสตร์และเทคโนโลยีอุตสาหกรรม มหาวิทยาลัยราชภัฏสวนสุนันทา พล.ต.ผศ.นพ.อารมย์ ขุนภาษี พล.ต.รศ.นพ.สุธี พานิชกุล จากโรงพยาบาลพระมงกุฎเกล้า และบริษัท ทีดีเอส (ประเทศไทย) จำกัด นอกจากนี้ยังมีทีมงานผู้ช่วยนักวิจัย Dr.Padma Crisnapati, Dr.Komang Agus Aryanto จากสาขาวิศวกรรมเมคคาทรอนิกส์ คณะครุศาสตร์อุตสาหกรรม มทร.ธัญบุรี ร่วมกันวิจัยและพัฒนาสิ่งประดิษฐ์เพื่อผู้พิการ หุ่นยนต์เสริมพลัง “RMUTT-Exoskeleton Robot “ เพื่อให้ผู้ป่วยอัมพาตครึ่งล่าง (Paraplegia) หรืออัมพาตครึ่งซีก (Hemiplegia) สามารถเดินได้โดยมีอุปกรณ์ในการช่วยพยุงเดิน

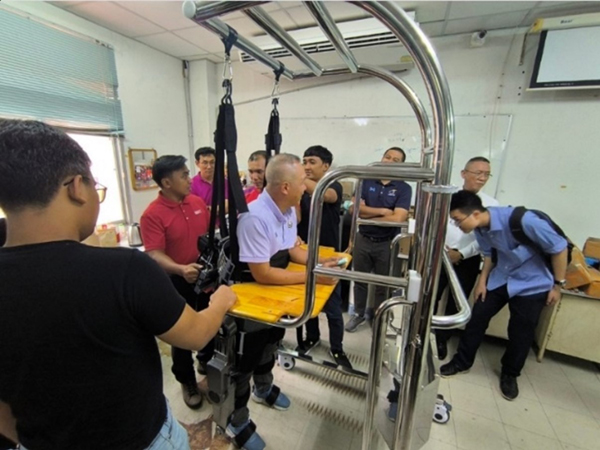
พล.ต.ผศ.นพ.อารมย์ ขุนภาษี เผยว่า หุ่นยนต์เสริมพลังนี้สามารถช่วยผู้พิการที่ป่วยจากโรคหลอดเลือดสมอง การบาดเจ็บไขสันหลังหรือเส้นประสาท ผู้ป่วยอัมพฤกษ์ อัมพาต ใช้ในการฝึกเดินหรือฝึกกล้ามเนื้อทำให้ร่างกายฟื้นฟูได้เร็วขึ้น และยังสามารถช่วยให้ผู้ป่วยกล้ามเนื้ออ่อนแรงได้ฝึกเดินเหมือนอยู่บนพื้นจริง ๆ ทำให้กล้ามเนื้อบริเวณเอว หลัง และสะโพกมีการฟื้นตัวและมีพัฒนาการที่ดีขึ้น อีกทั้งยังทำให้ผู้ป่วยกลับมามีคุณภาพทางร่างกายและกายภาพที่ดีขึ้น

หัวหน้าโครงการวิจัย รศ.ดร.เดชฤทธิ์ มณีธรรม กล่าวว่า หุ่นยนต์ RMUTT-Exoskeleton Robot ได้ถูกพัฒนามาอย่างต่อเนื่อง โดยในครั้งนี้ได้พัฒนาให้ใช้งานได้จริง โดยพัฒนามา 2 แบบ คือ หุ่นยนต์อัมพาตครึ่งล่าง (Paraplegia) และหุ่นยนต์อัมพาตครึ่งซีก (Hemiplegia) โดยมีการพัฒนาผลงาน คือ การสร้างแบบจำลองโดย Simulink ใน MATLAB เช่น การควบคุมมอเตอร์ การตรวจจับการเคลื่อนไหวของเซ็นเซอร์ และการประมวลผลข้อมูลจากปัญญาประดิษฐ์ (AI) เพิ่ม Simulink Blocks ที่จำเป็น เช่น Joint Actuators Sensors และ Controllers เพื่อควบคุมการเคลื่อนไหวของข้อต่อสะโพก เข่า และข้อเท้า โดยระบบควบคุมการเคลื่อนที่ จะประกอบไปด้วย ท่านั่ง ท่ายืน ท่าเดิน ท่าหยุด ตามลำดับ การออกแบบระบบควบคุม (Control System Design) สำหรับการเคลื่อนไหวของหุ่นยนต์โดยใช้ PID Control (Proportional-Integral-Derivative Control) เพื่อควบคุมมุมการเคลื่อนไหวของข้อต่อแต่ละจุด เช่น ควบคุมการหมุนของข้อต่อสะโพกเพื่อให้ขาก้าวเดินไปข้างหน้า เพิ่ม Adaptive Control เพื่อให้หุ่นยนต์สามารถปรับตัวตามสภาพร่างกายของผู้ป่วย และสามารถเคลื่อนไหวตามวงรอบการเดินของมนุษย์ (Gait Analysis)
ทางด้าน รองศาสตราจารย์ ดร.เบญจลักษณ์ เมืองมีศรี กล่าวว่า หุ่นยนต์เสริมพลังนี้โดยเบื้องต้นได้ทำการทดสอบและเก็บข้อมูลกับกลุ่มทหารที่ได้รับบาดเจ็บจากการปฏิบัติราชการภาคสนาม และประชาชนที่เป็นอัมพาตทั่วไป เพื่อศึกษาและเก็บข้อมูลการใช้งานของหุ่นยนต์เสริมพลัง โดยในอนาคตจะผลิตหุ่นยนต์เสริมพลังสำหรับเด็กที่อัมพาตต่อไป และ พล.ต.รศ.นพ.สุธี พานิชกุล ได้กล่าวเสริมว่า ในอนาคตจะมีการนำไปใช้กับผู้ป่วยราชการสนาม ที่ได้รับบาดเจ็บและปลดประจำการ ให้ได้ใช้อุปกรณ์นี้เพื่อให้มีคุณภาพชีวิตที่ดีขึ้นต่อไป

หุ่นยนต์เสริมพลัง Exoskeleton Robot ฝีมือคนไทย เป็นอุปกรณ์ในการช่วยพยุงเดิน เสริมพลังช่วยผู้พิการที่ป่วย ฝีมือคนไทยนักวิจัย 3 สถาบัน และความร่วมมือของบริษัทเอกชน ผนึกกำลังสร้างขึ้น แทนการนำเข้าหุ่นยนต์ช่วยเดินเป็นเทคโนโลยีที่มีราคาสูง ผู้สนใจสอบถามรายละเอียดเพิ่มเติมได้ที่ รศ.ดร.เดชฤทธิ์ มณีธรรม โทร. 0868821475


